-
1 приём в стойке
-
2 приём
1) ( захват) action, hold- запрещённый приём
- коронный приём
- обманный приём
- приём в стойке
- приём с оценкой в три очка
- разрешённый приём
- эффективный приём
- удушающий приём2) ( контроль мяча) reception- приём мяча двумя руками сверху
- приём мяча в падении
- приём мяча двумя руками снизу3) ( физический контакт) х.ш.- завершить проведение силового приёма
- провести жёсткий силовой приём против игрока -
3 флаг в положении при стойке вольно, по-парадному
Military: parade rest guidonУниверсальный русско-английский словарь > флаг в положении при стойке вольно, по-парадному
-
4 максимальный уровень
3.28 максимальный уровень: Максимально допустимый уровень наполнения резервуара жидкостью при его эксплуатации, установленный технической документацией на резервуар».
Раздел 4. Наименование изложить в новой редакции: «4 Методы поверки».
Пункт 4.1 после слова «методом» изложить в новой редакции:
«Допускаются:
- комбинация геометрического и объемного методов поверки, например, определение вместимости «мертвой» полости или вместимости резервуара в пределах высоты неровностей днища объемным методом при применении геометрического метода поверки;
- комбинация динамического объемного и статического объемного методов поверки».
Пункты 5.1.1 (таблица 1, головка), 5.1.2. Заменить значение: 50000 на 100000.
Подраздел 5.2. Наименование. Заменить слово: «основных» на «рабочих эталонов».
Подпункты 5.2.1.1, 5.2.1.2, 5.2.1.10, 5.2.2.5 изложить в новой редакции:
«5.2.1.1 Рулетки измерительные 2-го класса точности с верхними пределами измерений 10, 20, 30 и 50 м по ГОСТ 7502.
5.2.1.2 Рулетки измерительные с грузом 2-го класса точности с верхними пределами измерений 10, 20 и 30 м по ГОСТ 7502.
5.2.1.10 Штангенциркуль с диапазонами измерений: от 0 до 125 мм; от 0 до 150 мм; от 150 до 500 мм; от 500 до 1600 мм (черт. 3) по ГОСТ 166.
5.2.2.5 Рулетки измерительные с грузом 2-го класса точности с пределами измерений 10, 20 и 30 м по ГОСТ 7502».
Подраздел 5.2 дополнить подпунктами - 5.2.1.19, 5.2.2.9:
«5.2.1.19 Анализатор течеискатель АНТ-3.
5.2.2.9 Анализатор течеискатель АНТ-3».
Пункт 5.2.4. Заменить слова: «Основные средства поверки резервуаров» на «Применяемые рабочие эталоны и средства поверки».
Пункт 5.2.5 дополнить словами: «по взрывозащищенности - ГОСТ 12.1.011».
Подпункт 5.3.1.4 изложить в новой редакции:
«5.3.1.4 Резервуар при первичной поверке должен быть порожним. При периодической и внеочередной поверках в резервуаре может находиться жидкость до произвольного уровня, а в резервуаре с плавающим покрытием - до минимально допустимого уровня, установленного в технологической карте резервуара.
Плавающая крыша должна быть освобождена от посторонних предметов (от воды и других предметов, не относящихся к плавающей крыше)».
Подпункт 5.3.1.5 до слов «В этом случае» изложить в новой редакции:
«При наличии жидкости в резервуаре для нефтепродукта при его поверке (периодической или внеочередной) допускается использовать результаты измерений вместимости «мертвой» полости, полученные ранее, и вносить их в таблицу Б.9 приложения Б, если изменение базовой высоты резервуара по сравнению с результатами ее измерений в предыдущей поверке составляет не более 0,1 %, а изменения степени наклона и угла направления наклона резервуара составляют не более 1 %»;
подпункт дополнить примечанием:
«Примечание - Вместимость «мертвой» полости резервуара для нефти и нефтепродуктов, образующих парафинистые отложения, при проведении периодической и внеочередной поверок допускается принимать равной ее вместимости, полученной при первичной поверке резервуара или полученной при периодической поверке резервуара после его зачистки».
Подпункт 5.3.2.1. Примечание после слов «до плюс 2 °С - при применении дизельного топлива» дополнить словами: «и воды;».
Пункт 5.3.3 исключить.
Пункт 6.1 после слов «(государственной) метрологической службы» дополнить знаком сноски:1); дополнить сноской:
«1) На территории Российской Федерации орган государственной метрологической службы проходит аккредитацию на право проведения поверки резервуаров».
Пункт 6.2 изложить в новой редакции:
«6.2 Поверки резервуара проводят:
- первичную - после завершения строительства резервуара или капитального ремонта и его гидравлических испытаний - перед вводом его в эксплуатацию;
- периодическую - по истечении срока межповерочного интервала;
- внеочередную - в случаях изменения базовой высоты резервуара более чем на 0,1 % по 9.1.10.3; при внесении в резервуар конструктивных изменений, влияющих на его вместимость, и после очередного полного технического диагностирования».
Пункт 7.1. Заменить слова: «в установленном порядке» на «и промышленной безопасности в установленном порядке2)».
Пункт 7.1, подпункт 7.1.1 дополнить сноской - 2):
«2) На территории Российской Федерации действует Постановление Росгортехнадзора № 21 от 30.04.2002».
Пункт 7.1 дополнить подпунктом - 7.1.1:
«7.1.1 Измерения величин при поверке резервуара проводит группа лиц, включающая поверителя организации, указанной в 6.1, и не менее двух специалистов, прошедших курсы повышения квалификации, и других лиц (при необходимости), аттестованных по промышленной безопасности в установленном порядке2)».
Пункт 7.3 дополнить подпунктом - 7.3.3:
«7.3.3 Лица, выполняющие измерения, должны быть в строительной каске по ГОСТ 12.4.087».
Пункт 7.6. Заменить слова: «или уровень» на «и уровень».
Пункт 7.8 дополнить словами: «и должен быть в строительной каске по ГОСТ 12.4.087».
Пункт 7.9 изложить в новой редакции:
«7.9 Средства поверки по 5.2.1.4, 5.2.1.17, 5.2.1.19 при поверке резервуара геометрическим методом, средства поверки по 5.2.2.1, 5.2.2.2, 5.2.2.8, 5.2.2.9, 5.2.5 при поверке объемным методом должны быть во взрывозащищенном исполнении для групп взрывоопасных смесей категории II В-ТЗ по ГОСТ 12.1.011 и предназначены для эксплуатации на открытом воздухе».
Пункт 7.10 после слова «резервуара» дополнить словами: «в рабочей зоне»;
заменить слова: «на высоте 2000 мм» на «(на высоте 2000 мм)».
Подпункт 8.2.8 исключить.
Подпункт 9.1.1.1 изложить в новой редакции:
«9.1.1.1 Длину окружности Lн измеряют на отметке высоты:
- равной 3/4 высоты первого пояса, если высота пояса находится в пределах от 1500 до 2250 мм;
- равной 8/15 высоты первого пояса, если высота пояса составляет 3000 мм.
При наличии деталей, мешающих измерениям, допускается уменьшать высоту на величину до 300 мм от отметки 3/4 или 8/15 высоты первого пояса».
Подпункт 9.1.1.7 после слов «динамометра усилием» изложить в новой редакции:
«(100 ± 10) Н - для рулеток длиной 10 м и более;
(10 ± 1) Н - для рулеток длиной 1 - 5 м.
Для рулеток с желобчатой лентой - без натяжения».
Подпункт 9.1.1.13. Формула (3). Знаменатель. Заменить знак: «-» на «+».
Подпункт 9.1.1.17. Последний абзац изложить в новой редакции:
«Значение поправок (суммарных при наличии двух и более) на обход в миллиметрах вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.2.2 изложить в новой редакции:
«9.1.2.2 Окружность первого пояса резервуара, измеренную по 9.1.1, разбивают на равные части (откладывают дугу постоянной длины и наносят вертикальные отметки на стенке первого пояса), начиная с образующей резервуара, находящейся в плоскости А (рисунок А.10а), проходящей через точку измерений уровня жидкости и базовой высоты резервуара на направляющей планке измерительного люка и продольную ось резервуара, с соблюдением следующих условий:
- число разбивок должно быть четным;
- число разбивок в зависимости от вместимости резервуара выбирают по таблице 3.
Таблица 3
Наименование показателя
Значение показателя для вместимости резервуара, м3, не менее
100
200
300
400
700
1000
2000
3000
5000
10000
20000
30000
50000
100000
Число разбивок
24
26
28
30
32
34
36
38
40
42
44
46
48
52
Все отметки разбивок пронумеровывают по часовой стрелке в соответствии с рисунком А.10».
Подпункт 9.1.2.5. Второй абзац. Заменить слова: «или ниже ребра» на «и ниже ребра».
Пункт 9.1.3 изложить в новой редакции:
«9.1.3 Определение степени наклона и угла направления наклона резервуара
9.1.3.1 Степень наклона h и угол направления наклона j резервуара определяют по результатам измерений угла и направления наклона контура днища резервуара снаружи (или изнутри) с применением нивелира с рейкой.
9.1.3.2 Степень наклона и угол направления наклона резервуара определяют в два этапа:
- на первом этапе устанавливают номера двух противоположных отметок разбивки (образующих резервуара), через которые проходит приближенное направление наклона резервуара;
- на втором этапе определяют степень наклона и угол уточненного направления наклона резервуара.
9.1.3.3 Приближенное направление наклона резервуара определяют в следующей последовательности:
а) проводят разбивку длины окружности первого пояса по 9.1.2.2;
б) освобождают утор окраек днища (далее - утор днища) резервуара от грунта;
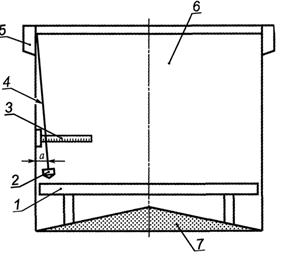
в) устанавливают нивелир напротив первой отметки разбивки на расстоянии 5 - 10 м от резервуара и приводят его в горизонтальное положение;
г) устанавливают рейку вертикально в точке на уторе днища, находящейся напротив первой отметки разбивки, отсчитывают показание шкалы рейки l1 с погрешностью до 1 мм;
д) последовательно устанавливая рейку по часовой стрелке в точках на уторе днища, находящихся напротив отметок разбивки 2, 3,..., v, отсчитывают показания шкалы рейки l2, l3,..., lvс погрешностью до 1 мм;
е) для снятия показаний рейки в оставшихся точках отметок разбивки нивелир устанавливают на расстоянии 5 - 10 м от резервуара напротив отметки разбивки (v +1) и, устанавливая рейку вторично в точке отметки разбивки v, вторично снимают показание рейки l¢v. При этом показание рейки в точке, находящейся напротив отметки разбивки v (крайней) до перенесения нивелира на другое место lv, должно совпадать с показанием рейки в этой же точке разбивки v после перенесения нивелира на другое место, то есть l¢v с погрешностью до 1 мм. Выполнение этого условия обеспечивается регулированием высоты нивелира после перенесения его на другое место.
В случае невозможности выполнения вышеуказанного условия регулированием высоты нивелира на показание рейки в точках, находящихся напротив отметок разбивки (v + 1), (v + 2),..., s, вводят поправку, например на показание рейки в точке, находящейся напротив отметки разбивки (v + 1), l¢v+1 по формуле
lv+1 = l¢v+1 + Dl, (3a)
где l¢v+1 - показание рейки после перенесения нивелира на другое место, мм;
Dl - поправка, мм. Ее значение определяют по формуле
Dl = lv - l¢v, (3б)
где lv - показание рейки, находящейся напротив отметки v до перенесения нивелира на другое место, мм;
l¢v - показание рейки, находящейся напротив отметки v после перенесения нивелира на другое место, мм;
ж) выполняя аналогичные операции по перечислению е), отсчитывают показания рейки до отметки разбивки т (т - число отметок разбивки длины окружности первого пояса резервуара).
Показания шкалы рейки lk вносят в протокол, форма которого приведена в приложении Б (таблица Б.14).
Определяют значение разности показаний шкалы рейки в точках утора днища, находящихся напротив двух противоположных отметок разбивки Dlk, мм (см. таблицу Б.14):
- при числе отметок k от 1 до
 по формуле
по формулеDl¢k = lk - l(m/2+k); (3в)
- при числе отметок от
 до т по формуле
до т по формулеDl²k = lk - l(k-m/2), (3г)
где lk - показание шкалы рейки в точке, находящейся напротив k-й отметки, мм;
l(m/2+k), l(k-m/2) - показания шкалы рейки в точках, находящейся напротив отметок разбивки (т/2 + k) и (k - т/2), мм;
k - номер отметки разбивки. Его значения выбирают из ряда: 1, 2, 3, 4,..., т;
т - число отметок разбивки длины окружности первого пояса резервуара.
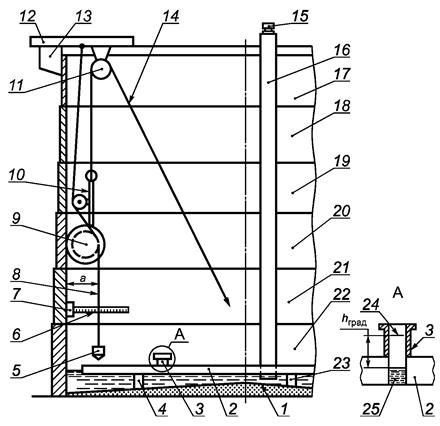
Строят график (рисунок А.10) функции Dlk, рассчитываемой по формулам (3в) и (3г). Если кривая, соединяющая точки графика Dlk относительно абсциссы, имеет вид синусоиды с периодом, равным отрезку 1 - т (кривая С на рисунке А.10), то резервуар стоит наклонно, если нет (кривая В) - резервуар стоит не наклонно.
По максимальному значению разности (Dlk)max, определенному по формуле (3в) или (3г), устанавливают приближенное направление наклона резервуара (рисунок А.10б).
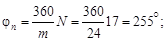
Приближенное значение угла направления наклона резервуара jп определяют по формуле
 (3д)
(3д)где N - число разбивок, отсчитываемое от первой отметки разбивки до приближенного направления наклона резервуара, равное k - 1.
9.1.3.4 Степень наклона и уточненный угол направления наклона резервуара определяют в следующей последовательности:
а) проводят дополнительное разбивание длины дуги противоположных разбивок (рисунок А.10б), например находящихся справа от отметок разбивки 6 и 18 (разбивки N5 и N17) и слева от отметок разбивки 6 и 18 (разбивки N6 и N18) от приближенного направления наклона контура днища, определенного по 9.1.3.3;
б) длину дуги дополнительного разбивания DL, мм, соответствующую 1°, вычисляют по формуле

где Lн - длина наружной окружности первого пояса резервуара, мм;
в) дугу длиной, вычисленной по формуле (3е), откладывают справа и слева (наносят вертикальные отметки на стенке первого пояса), начиная с образующих (отметок разбивки), по которым проходит приближенное направление наклона резервуара. Отметки отложенных дополнительных дуг (разбивок) нумеруют арабскими цифрами справа и слева от приближенного направления наклона резервуара;
г) выполняя операции, указанные в перечислениях в) и г) 9.1.3.3, отсчитывают показания шкалы рейки в точках дополнительного разбивания дуг основных разбивок, находящихся слева lл и справа lп от приближенного направления наклона резервуара, с погрешностью до 1 мм.
Результаты показаний шкалы lл, lп вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.6.1 изложить в новой редакции:
«9.1.6.1. Высоту поясов hн измеряют с наружной стороны резервуара вдоль образующей резервуара, находящейся в плоскости А (рисунок А.10а) по 9.1.2.2, при помощи измерительной рулетки с грузом и упорного угольника».
Подпункт 9.1.7.1 после слов «от днища резервуара» изложить в новой редакции: «и от стенки первого пояса резервуара lд угла j1 между плоскостью А и плоскостью С (рисунок А.10а). Значение угла j1 определяют методом разбивания длины окружности первого пояса с погрешностью ± 1° в следующей последовательности:
- длину окружности первого пояса изнутри резервуара разбивают на восемь частей, начиная с плоскости А (рисунок А.10а), по часовой стрелке;
- на днище резервуара через его центр и точки разбивки проводят восемь радиусов;
- устанавливают номер сектора, в пределах которого находится плоскость С (рисунок А.10а);
- в пределах вышеустановленного сектора на стенке резервуара до плоскости С откладывают (размечают) n0-ное число дополнительных хорд длиной S0, соответствующей 1°, вычисляемой по формуле
- значение угла j1 определяют по формуле
j1 = 45N0 + п0,
где N - число больших разбиваний;
п0 - число отложений хорды S0 до плоскости С.
Результаты измерений величин N0, n0, j1 вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.6.5 дополнить абзацем:
«Толщину слоя внутреннего антикоррозионного покрытия dс.п измеряют при помощи ультразвукового толщиномера с погрешностью до 0,1 мм».
Подпункт 9.1.6.6 перед словом «вносят» дополнить обозначением: dс.п.
Пункт 9.1.8. Наименование дополнить словами: «и параметров местных неровностей (хлопунов)».
Подпункт 9.1.8.1 изложить в новой редакции:
«9.1.8.1 Если резервуар имеет несколько приемно-раздаточных патрубков, то высоту «мертвой» полости, соответствующую j-му приемно-раздаточному патрубку (hм.п)j, измеряют рулеткой по стенке резервуара от днища резервуара до нижней точки j-го приемно-раздаточного патрубка. Нумерацию высот «мертвой» полости проводят, начиная с плоскости А (рисунок А.10а).
Если резервуар имеет приемно-раздаточные устройства, например, устройства ПРУ-Д, то измеряют рулеткой (рисунок А.17а):
- высоту по стенке резервуара от контура днища до места установки j-го приемно-раздаточного устройства hyj;
- расстояние от нижнего образующего j-го приемно-раздаточного устройства до его нижнего или верхнего среза hcj;
- длину j-го приемно-раздаточного устройства (расстояние от центра среза устройства до стенки резервуара) lcj.
Результаты измерений величин (hм.п)j, hyj, hcj, lcj в миллиметрах вносят в протокол, форма которого приведена в приложении Б».
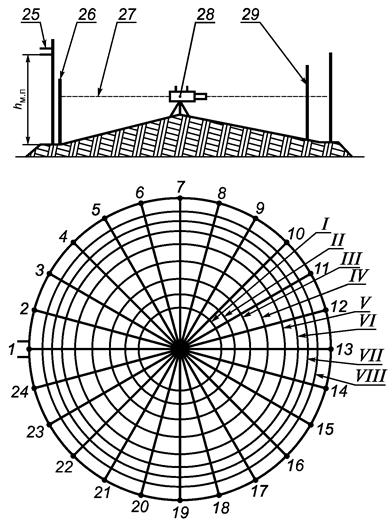
Подпункт 9.1.8.2. Второй абзац. Заменить слова: «с восемью радиусами» на «с 24 радиусами», «восьми радиусов» на «24 радиусов», «8 равных частей» на «24 равных части»;
заменить значение: 0 - 8 на 0 - 24;
третий абзац изложить в новой редакции:
«- при отсутствии центральной трубы нивелир устанавливают в центре днища резервуара и измеряют расстояние по вертикали от неровностей днища до визирной линии (до центра окуляра) нивелира (b0) при помощи измерительной рулетки с грузом или рейкой. При наличии центральной трубы нивелир устанавливают последовательно в двух противоположных точках, не лежащих на отмеченных радиусах и отстоящих от стенки резервуара не более 1000 мм».
Пункт 9.1.8 дополнить подпунктами - 9.1.8.4 - 9.1.8.7:
«9.1.8.4 Угол j2 между плоскостью А (рисунок А.10а) и плоскостью В, проходящую через продольные оси приемно-раздаточного патрубка и резервуара, определяют с погрешностью не более ± 1°, используя данные разбивки длины окружности первого пояса по 9.1.2.2 в следующей последовательности:
- устанавливают число полных разбивок N¢0, находящихся до плоскости В (рисунок А.10а);
- по длине дуги разбивки, в пределах которой проходит плоскость В, размечают до образующей приемно-раздаточного патрубка n¢0-ное число дополнительных дуг длиной DL, соответствующей 1°. Длину дуги DL, мм, вычисляют по формуле

- значение угла j2 определяют по формуле
где m - число разбивок длины окружности первого пояса резервуара;
rп.р - радиус приемно-раздаточного патрубка, мм.
9.1.8.5 Результаты измерений величины j2 вносят в протокол, форма которого приведена в приложении Б.
9.1.8.6 В случае определения вместимости «мертвой» полости объемным статическим методом в соответствии с 9.2.2 результаты измерений оформляют протоколом поверки для «мертвой» полости по форме, приведенной в приложении В (заполняют таблицы В.4, В.6, В.8).
9.1.8.7 Площадь хлопуна sx, м2, определяют по результатам измерений длины и ширины хлопуна.
Длину lх и ширину bх хлопуна измеряют измерительной рулеткой. Показания рулетки отсчитывают с точностью до 1 мм.
Высоту хлопуна hx измеряют штангенциркулем или измерительной линейкой. Показания штангенциркуля или линейки отсчитывают с точностью до 1 мм.
Результаты измерений величин lx, bх, hx вносят в протокол, форма которого приведена в приложении Б».
Подпункт 9.1.9.1 изложить в новой редакции:
«9.1.9.1 Измеряют расстояние по горизонтали между линейкой, установленной вертикально по первой внешней образующей резервуара (рисунок А.10), и внешней образующей измерительного люка l1 (рисунок А.16) при помощи измерительной рулетки с погрешностью ± 5 мм».
Подпункт 9.1.10.1. Второй абзац изложить в новой редакции:
«При наличии жидкости в резервуарах с плавающим покрытием уровень ее должен быть не ниже уровня, установленного технологической картой на резервуар»;
дополнить абзацем:
«Базовую высоту резервуара с плавающей крышей измеряют через измерительный люк, установленный на направляющей стойке плавающей крыши или на трубе для радарного уровнемера (рисунок А.2а)».
Подпункт 9.1.10.3 изложить в новой редакции:
«9.1.10.3 Базовую высоту измеряют ежегодно. Ежегодные измерения базовой высоты резервуара проводит комиссия, назначенная приказом руководителя предприятия - владельца резервуара, в состав которой должен быть включен специалист, прошедший курсы повышения квалификации по поверке и калибровке резервуаров.
При ежегодных измерениях базовой высоты резервуара без плавающего покрытия резервуар может быть наполнен до произвольного уровня, резервуар с плавающим покрытием - до минимально допустимого уровня.
Результат измерений базовой высоты резервуара не должен отличаться от ее значения, указанного в протоколе поверки резервуара, более чем на 0,1 %.
Если это условие не выполняется, то проводят повторное измерение базовой высоты при уровне наполнения резервуара, отличающимся от его уровня наполнения, указанного в протоколе поверки резервуара, не более чем на 500 мм.
Результаты измерений базовой высоты оформляют актом, форма которого приведена в приложении Л.
При изменении базовой высоты по сравнению с ее значением, установленным при поверке резервуара, более чем на 0,1 % устанавливают причину и устраняют ее. При отсутствии возможности устранения причины проводят внеочередную поверку резервуара.
Примечание - В Российской Федерации специалисты проходят курсы повышения квалификации в соответствии с 7.1».
Подпункт 9.1.11.1 перед словом «берут» дополнить словами: «а также верхнее положение плавающего покрытия h¢п».
Подпункт 9.1.11.2 изложить в новой редакции:
«9.1.11.2 Высоту нижнего положения плавающего покрытия hп измеряют рулеткой от точки касания днища грузом рулетки до нижнего края образующей плавающего покрытия. Показания рулетки отсчитывают с точностью до 1 мм. Измерения проводят не менее двух раз. Расхождение между результатами двух измерений должно быть не более 2 мм».
Подпункт 9.1.11.3 после слов «и результаты измерений» дополнить обозначением: h¢п.
Подраздел 9.1 дополнить пунктами - 9.1.12, 9.1.13:
«9.1.12 Определение длины внутренней окружности вышестоящего пояса резервуара с плавающей крышей
9.1.12.1 При отсутствии возможности применения приспособления, показанного на рисунке А.6, длину внутренней окружности вышестоящего пояса определяют:
второго пояса (при высоте поясов от 2250 до 3000 мм) или третьего (при высоте поясов 1500 мм) - методом отложения хорд по внутренней стенке пояса;
вышестоящих поясов, начиная с третьего (при высоте поясов от 2250 до 3000 мм) или, начиная с четвертого (при высоте поясов от 1500 мм), - по результатам измерений радиальных отклонений образующих резервуара, проведенных изнутри резервуара.
9.1.12.2 Хорды откладывают на уровнях, отсчитываемых от верхней плоскости плавающей крыши:
1600 мм - при высоте поясов от 2250 до 3000 мм;
1200 мм - при высоте поясов 1500 мм.
9.1.12.3 Перед откладыванием хорд на уровне 1600 мм или на уровне 1200 мм, указанных в 9.1.12.2, при помощи рулетки с грузом через каждые 1000 мм наносят горизонтальные отметки длиной 10 - 20 мм по стенке поясов.
9.1.12.4 Отметки, нанесенные по стенкам поясов на уровнях, указанных в 9.1.12.2, соединяют между собой, применяя гибкую стальную ленту (рулетку). При этом линии горизонтальных окружностей проводят толщиной не более 5 мм.
9.1.12.5 Вычисляют длину хорды S1 по формуле
S1 = D1sin(a1/2), (3ж)
где D1 - внутренний диаметр первого пояса резервуара, вычисляемый по формуле
D1 = Lвн/p, (3и)
где Lвн - внутренняя длина окружности первого пояса, вычисляемая по формуле (Г.2);
a1 - центральный угол, соответствующий длине хорды S1 вычисляемый по формуле
a1 = 360/m1, (3к)
где т1 - число отложений хорд по линиям горизонтальных окружностей. Число т1 в зависимости от номинальной вместимости резервуара принимают по таблице 4.
Таблица 4
Номинальная вместимость резервуара, м3
Число отложений хорд т1
Номинальная вместимость резервуара, м3
Число отложений хорд т1
100
24
3000 (4000)
38
200
26
5000
40
300
28
10000
58
400
32
20000
76
700
34
30000
80
1000
34
50000
120
2000
36
100000
160
9.1.12.6 Хорду S1, длина которой вычислена по формуле (3ж), откладывают по линии горизонтальной окружности, проведенной на высоте 1600 мм и на высоте 1200 мм, указанных в 9.1.12.2, при помощи штангенциркуля (ГОСТ 166, черт. 3) с диапазоном измерений от 500 до 1600 мм.
9.1.12.7 После отложений хорд по 9.1.12.6 измеряют длину остаточной хорды Soп при помощи штангенциркуля с диапазоном измерений 0 - 150 мм с погрешностью не более 0,1 мм. Обозначение «п» соответствует термину: «покрытие».
9.1.12.8 Значения величин S1 и S0п вносят в протокол, форма которого приведена в приложении Б.
9.1.12.9 Длины внутренних окружностей поясов, находящихся выше поясов, указанных в 9.1.12.1, определяют по результатам измерений радиальных отклонений образующих резервуара от вертикали изнутри резервуара с применением измерительной каретки (далее - каретки) в следующей последовательности:
а) длину окружности первого пояса, измеренную по 9.1.1, разбивают на равные части по 9.1.2.2 (наносят вертикальные отметки на уровне 1600 мм или на уровне 1200 мм в соответствии с 9.1.12.3), начиная с плоскости А (рисунок А.10а);
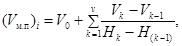
б) штангу 12 с блоком 11 (рисунок А.2а), при помощи которого каретка перемещается по внутренней поверхности резервуара, устанавливают у края площадки обслуживания 13;
в) линейку 6 устанавливают на высоте 400 мм по перечислению а) 9.1.12.9 от верхней плоскости плавающей крыши при помощи магнитного держателя 7 перпендикулярно к стенке резервуара, поочередно для каждой отметки разбивки;
г) для перехода от одной отметки разбивки к другой каретку опускают, а штангу со всей оснасткой передвигают по кольцевой площадке обслуживания резервуара. Расстояние от стенки резервуара до нити отвеса а отсчитывают по линейке 6;
д) измерения вдоль каждой образующей резервуара начинают с отметки разбивки под номером один первого пояса. На каждом следующем поясе измерения проводят в трех сечениях: среднем, находящемся в середине пояса, нижнем и верхнем, расположенных на расстоянии 50 - 100 мм от горизонтального сварочного шва. На верхнем поясе - в двух сечениях: нижнем и среднем. Отсчеты по линейке снимают с погрешностью в пределах ± 1 мм в момент, когда каретка установлена в намеченной точке при неподвижном отвесе;
е) в начальный момент каретку для всех образующих резервуара останавливают на линии горизонтальной окружности на уровне 1600 мм или на уровне 1200 мм.
Результаты измерений расстояния а в миллиметрах вносят в протокол, форма которого приведена в приложении Б.
9.1.13 Высота газового пространства в плавающей крыше
9.1.13.1 Высоту газового пространства hгп (3.25) измеряют при помощи измерительной рулетки с грузом или линейкой не менее двух раз. Расхождение между результатами двух измерений не должно превышать 1 мм.
9.1.13.2 Результаты измерений hгп вносят в протокол, форма которого приведена в приложении Б».
Пункт 9.2.1 дополнить перечислением - е):
«е) угла j2 в соответствии с 9.1.8.4».
Подпункт 9.2.1.2. Заменить номер подпункта: 9.2.1.2 на 9.2.1.1;
перед словом «вносят» дополнить обозначением: j2.
Пункт 9.2.2. Наименование дополнить словами: «или в пределах высоты неровностей днища».
Подпункт 9.2.2.1 после слов «В пределах «мертвой» полости» дополнить словами: «(рисунок А.17) и в пределах неровностей днища (рисунок А.18), если неровности днища выходят за пределы «мертвой» полости;
заменить слова: «не более чем на 30 мм» на «в пределах от 10 до 100 мм».
Подпункт 9.2.2.2. Перечисление д). Заменить слова: «значения 30 мм» на «значения в пределах от 10 до 100 мм».
Пункт 9.2.3 после слов «выше «мертвой» полости» дополнить словами: «или выше высоты неровностей днища».
Подпункт 9.2.3.1 после слов «высоте «мертвой» полости» дополнить словами: «(высоте неровностей днища)».
Подпункт 9.2.3.2 после слов «в пределах «мертвой» полости» дополнить словами: «(до высоты неровностей днища)».
Подпункт 9.2.3.3. Исключить слова: «в соответствии с 9.2.2.2, 9.2.2.3».
Пункт 9.2.3 дополнить подпунктом - 9.2.3.6:
«9.2.3.6 При достижении уровня поверочной жидкости, соответствующего полной вместимости резервуара, измеряют базовую высоту резервуара Нб в соответствии с 9.1.10. Значение базовой высоты не должно отличаться от значения, измеренного по 9.2.1, более чем на 0,1 %».
Подпункт 9.2.5.1. Последний абзац. Заменить значение: ± 0,1 °С на ± 0,2 °С.
Пункт 9.2.6, подпункты 9.2.6.1, 9.2.6.2 исключить.
Подпункт 10.3.1.1. Заменить слова: «максимального уровня Hmax» на «предельного уровня Нпр»;
формулу (4) изложить в новой редакции:
 (4)»;
(4)»;экспликацию после абзаца «fл - высота точки касания днища грузом рулетки;» дополнить абзацем:
«Lвн - длина внутренней окружности 1-го пояса, вычисляемая по формуле (Г.2)».
Подпункт 10.3.1.2. Формулы (5) - (8) изложить в новой редакции:
 (5)
(5) (6)
(6) на участке от Нм.п до Нп, (7)
на участке от Нм.п до Нп, (7)где DV²в.д - объем внутренних деталей, включая объемы опор плавающего покрытия, на участке от Нм.п до Нп;
 - на участке от Нм.п до Нп. (8)»;
- на участке от Нм.п до Нп. (8)»;последний абзац, формулы (9), (10) и экспликации исключить.
Подпункт 10.3.1.5 и формулы (11) - (15) исключить.
Подпункт 10.3.2.1 изложить в новой редакции:
«10.3.2.1 Градуировочную таблицу составляют, суммируя последовательно, начиная с исходного уровня (уровня, соответствующего высоте «мертвой» полости Нм.п), вместимости резервуара, приходящиеся на 1 см высоты наполнения, в соответствии с формулой
 (16)
(16)где Vм.п - вместимость «мертвой» полости, вычисляемая по формуле (Е.12) при изменении k от 0 до v, или по формуле, приведенной в Е.13;
Vk, Vk-1 - дозовые вместимости резервуара при наливе в него k и (k - 1) доз, соответствующие уровням Нk, H(k-1), вычисляемые по формуле (Е.12) при изменении k от v + 1 до значения k, соответствующего полной вместимости резервуара, или по формулам (Е.13), (Е.14) приложения Е и т.д.
Вместимость «мертвой» полости резервуара вычисляют по формуле
где V0 - объем жидкости до точки касания днища грузом рулетки».
Пункт 11.1. Второй абзац исключить.
Пункт 11.2. Перечисление д) дополнить словами: «(только в случае проведения расчетов вручную)».
Пункт 11.3. Первый абзац после слов «в приложении В» изложить в новой редакции: «Форма акта измерений базовой высоты резервуара, составленного при ежегодных ее измерениях, приведена в приложении Л»;
последний абзац изложить в новой редакции:
«Протокол поверки подписывают поверитель и лица, принявшие участие в проведении измерений параметров резервуара»;
дополнить абзацем:
«Титульный лист и последнюю страницу градуировочной таблицы подписывает поверитель. Подписи поверителя заверяют оттисками поверительного клейма, печати (штампа). Документы, указанные в 11.2, пронумеровывают сквозной нумерацией, прошнуровывают, концы шнурка приклеивают к последнему листу и на месте наклейки наносят оттиск поверительного клейма, печати (штампа)».
Пункт 11.4 изложить в новой редакции:
«11.4 Градуировочные таблицы на резервуары утверждает руководитель организации национальной (государственной) метрологической службы или руководитель метрологической службы юридического лица, аккредитованный на право проведения поверки».
Раздел 11 дополнить пунктом - 11.6 и сноской:
«11.6 Если при поверке резервуара получены отрицательные результаты даже по одному из приведенных ниже параметров:
- значение вместимости «мертвой» полости имеет знак минус;
- размеры хлопунов не соответствуют требованиям правил безопасности1);
- значение степени наклона резервуара более 0,02, если это значение подтверждено результатами измерений отклонения окраек контура днища резервуара от горизонтали, выполненных по методике диагностирования резервуара, то резервуар считается непригодным к эксплуатации и выдают «Извещение о непригодности»;
«1) На территории Российской Федерации действует Постановление Росгортехнадзора № 76 от 09.06.2003 об утверждении Правил устройства вертикальных цилиндрических стальных резервуаров для нефти и нефтепродуктов».
Приложение А дополнить рисунками - А.2а, А.10а (после рисунка А.10), А.10б, А.10в, А.11а, А.17а;
рисунки А.10, А.14, А.15, А.16 изложить в новой редакции:
1 - неровности днища; 2 - плавающая крыша; 3, 15 - измерительный люк; 4, 23 - опоры плавающей крыши; 5 - груз отвеса; 6 - линейка;
Рисунок А.2а - Схема измерений радиальных отклонений образующих резервуара с плавающей крышей
1 - контур днища резервуара; 2 - измерительный люк; Dlk - функция, вычисляемая по формулам (3в) и (3г);
Рисунок А.10 - График функции Dlk и схема направления наклона резервуара
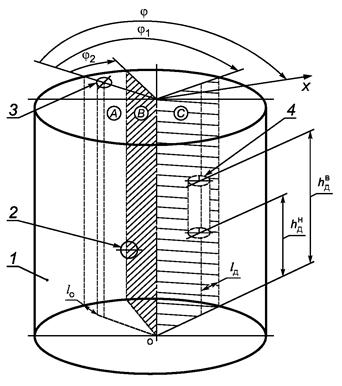
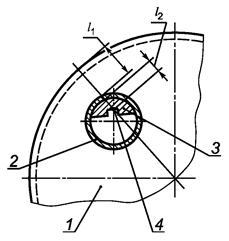
1 - стенка резервуара; 2 - приемно-раздаточный патрубок; 3 - измерительный люк; 4 - внутренняя деталь;
Рисунок А.10а - Схема измерений координат внутренней детали
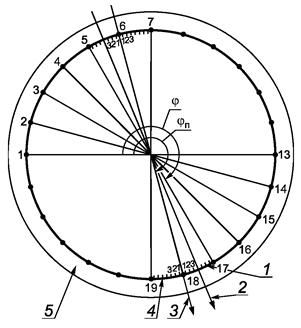
1 - дополнительные отметки справа; 2 - уточненное направление наклона контура днища;
 j = jп - п2 = 255 - 3 = 252°
j = jп - п2 = 255 - 3 = 252°Рисунок А.10б - Схема определения угла направления наклона днища
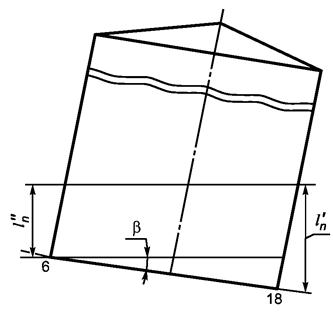
l¢n, l²n - максимальное и минимальное показания рейки по уточненному направлению наклона контура днища;
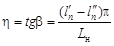
Рисунок А.10в - Схема наклоненного резервуара
1 - плавающая крыша с опорами; 2 - груз отвеса; 3 - линейка; 4 - нить отвеса; 5 - верхняя площадка обслуживания;
Рисунок А.11а - Схема измерений степени и угла направления наклона резервуара с плавающей крышей
1 - 24 - радиусы; 25 - приемно-раздаточный патрубок; 26 - рейка; 27 - горизонт нивелира; 28 - нивелир;
Рисунок А.14 - Нивелирование днища резервуара при отсутствии центральной трубы
1 - 24 - радиусы; 25 - приемно-раздаточный патрубок; 26 - рейка; 27 - рейка в точке касания днища грузом рулетки;
Рисунок А.15 - Нивелирование днища резервуара при наличии центральной трубы
1 - кровля резервуара; 2 - измерительный люк; 3 - направляющая планка; 4 - точка измерений уровня жидкости или
Рисунок А.16 - Схема размещения измерительного люка
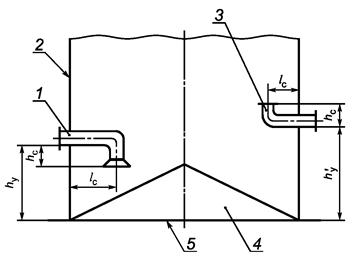
1, 3 - приемно-раздаточные устройства; 2 - стенка резервуара; 4 - неровности днища; 5 - контур днища;
Рисунок А.17а - Схема размещения приемно-раздаточных устройств
Приложение Б. Таблицу Б.1 изложить в новой редакции:
Таблица Б.1 - Общие данные
Код документа
Регистрационный номер
Дата
Основание для проведения поверки
Место проведения поверки
Средства измерений
Резервуар
Число
Месяц
Год
Тип
Номер
Назначение
Наличие угла наклона
Погрешность определения вместимости резервуара, %
1
2
3
4
5
6
7
8
9
10
11
12
13
Примечание - В графе 12 указывают знак «+» при наличии угла наклона, знак «-» - при его отсутствии.
таблицу Б.4 изложить в новой редакции:
Таблица Б.4 - Радиальные отклонения образующих резервуара от вертикали
Номер пояса
Точка измерения
Показание линейки а, мм
1
2
3
4
5
6
7
8
9
10
11
12
...
...
т
I
3/4h1
II
Н
С
В
III
Н
С
в
IV
н
с
в
V
н
с
в
VI
н
с
в
...
...
n
н
с
Примечание - При наличии ребра жесткости, например, в v-м поясе (9.1.2.5):
а) если ребро жесткости находится в середине пояса, то в строке «С» вносят показание линейки, определенное по формуле
где
 ,
,  - показания линейки в точках выше и ниже ребра жесткости;
- показания линейки в точках выше и ниже ребра жесткости;б) если ребро жесткости находится ближе к верхнему или нижнему сварному шву, то среднее расстояние от стенки резервуара до нити отвеса вычисляют по формуле
где
 - показание линейки в точке выше нижнего (ниже верхнего) сварного шва.
- показание линейки в точке выше нижнего (ниже верхнего) сварного шва.дополнить таблицей - Б.4.1:
Таблица Б.4.1 - Длины хорд
В миллиметрах
Уровень отложений хорды
Хорда
основная S1п
остаточная S0п
1-е измерение
2-е измерение
1600
1200
Таблица Б.5. Наименование изложить в новой редакции:
«Таблица Б.5 - Параметры поверочной и хранимой жидкостей (нефти и нефтепродуктов)»;
дополнить таблицей - Б.5.1:
Таблица Б.5.1 - Радиальные отклонения образующих первого (второго или третьего для резервуаров с плавающей крышей) и последнего n-го поясов от вертикали
В миллиметрах
Номер пояса
Радиальные отклонения образующих поясов от вертикали
1
2
3
4
5
6
7
...
...
т
I (II или III)
n
таблицу Б.6 дополнить графой - 7:
Толщина слоя антикоррозионного покрытия dс.п, мм
7
таблицы Б.7, Б.8, Б.9 изложить в новой редакции:
Таблица Б.7 - Внутренние детали цилиндрической формы
Диаметр, мм
Высота от днища, мм
Расстояние от стенки первого пояса lд, мм
Число разбиваний
Угол j1,...°
Нижняя граница hвд
Верхняя граница hвд
N0
n0
Таблица Б.8 - Внутренние детали прочей формы
Объем, м3
Высота от днища, мм
Расстояние от стенки первого пояса lд, мм
Число разбиваний
Угол j1,...°
Нижняя граница hвд
Верхняя граница hвд
N0
n0
Таблица Б.9 - Параметры «мертвой» полости с приемно-раздаточным патрубком (ПРП)
Высота hм.п, мм, ПРП под номером
Угол j2,...°, ПРП под номером
Вместимость Vм.п, м3
1
2
3
4
1
2
3
4
1
2
3
4
5
6
7
8
9
Примечание - Графу 9 заполняют только при определении вместимости «мертвой» полости объемным методом и принятие вместимости «мертвой» полости по 5.3.1.5.
дополнить таблицами - Б.9.1, Б.9.2:
Таблица Б.9.1 - Параметры «мертвой» полости с приемно-раздаточным устройством (ПРУ)
Высота установки hу, мм, ПРУ под номером
Расстояние hc, мм, ПРУ под номером
Длина lс, мм, ПРУ под номером
Угол j2,...°, ПРУ под номером
Вместимость
1
2
1
2
1
2
1
2
1
2
3
4
5
6
7
8
9
Примечание - Число граф в зависимости от числа приемно-раздаточных устройств может быть увеличено.
Таблица Б.9.2 - Параметры местных неровностей (хлопунов)
Хлопун
Длина lх
Ширина bх
Высота hх
Таблица Б.10. Графа 1. Заменить значение: 8 на 24;
дополнить примечанием - 3:
«3 При отсутствии центральной трубы вносят (графа 3) значение b0»;
таблицы Б.13, Б.14 изложить в новой редакции:
Таблица Б.13 - Базовая высота резервуара
В миллиметрах
Точка измерения базовой высоты Нб
Номер измерения
1
2
Риска измерительного люка
Верхний срез измерительного люка
Таблица Б.14 - Степень наклона и угол приближенного направления наклона резервуара
Номер точки разбивки k от 1 до т/2
Отсчет по рейке lk, мм
Номер точки разбивки k от (m/2 + l) до т
Отсчет по рейке lk, мм
1
2
3
4
1
l1
m/2 + 1
l(m/2 + 1)
2
l2
m/2 + 2
l(m/2 + 2)
3
l3
m/2 + 3
l(m/2 + 3)
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
m/2
l(m/2)
т
lm
Примечания
1 k (графы 1, 3)- номер разбивки длины окружности первого пояса резервуара, выбирают из ряда: 1, 2, 3,..., т.
2 lk (графы 2, 4) - отсчеты по рейке в точках разбивки k.
дополнить таблицей - Б.14.1:
Таблица Б.14.1 - Степень наклона и угол уточненного направления наклона резервуара
Значение угла n2 при Nп =...
Показание рейки по правой разбивке lп, мм
Значение угла n2 при Nл =...
Показание рейки по правой разбивке lл, мм
l¢п
l²п
l¢л
l²л
1
2
3
4
5
6
-1°
+1°
-2°
+2°
-3°
+3°
-4°
+4°
-5°
+5°
-6°
+6°
-7°
+7°
-8°
+8°
-9°
+9°
-10°
+10°
-11°
+11°
-12°
+12°
-13°
+13°
-14°
+14°
Примечания
1 В графах 1, 4 вносят числа разбивок Nп, Nл (например Nп = 17).
2 l¢п, l²п (графы 2, 3) - показания рейки по правым противоположным разбивкам.
3 l¢л, l²л (графы 5, 6) - показания рейки по левым противоположным разбивкам.
таблицу Б.15 изложить в новой редакции:
Таблица Б.15 - Плавающее покрытие
Масса тп, кг
Диаметр Dп, мм
Расстояние от днища резервуара при крайнем положении, мм
Диаметр отверстия, мм
Параметры опоры
Уровень жидкости в момент всплытия Hвсп, мм
Объем жидкости в момент всплытия Vвсп, м3
нижнем hп
верхнем hп
D1
D2
D3
Диаметр, мм
Число, шт.
Высота, мм
1
2
3
4
5
6
7
8
9
10
11
12
Примечания
1 Если опоры плавающего покрытия приварены к днищу резервуара, то их относят к числу внутренних деталей.
2 Графы 11 и 12 заполняют только при применении объемного метода.
дополнить таблицей - Б.16:
Таблица Б.16 - Высота газового пространства в плавающей крыше
В миллиметрах
Точка измерения высоты газового пространства hгп
Номер измерения
1
2
Риска измерительного люка
Верхний срез измерительного люка
Приложение В. Таблицы В.3, В.5 изложить в новой редакции:
Таблица В.3 - Величины, измеряемые в «мертвой» полости
Высота hм.п, мм, ПРП под номером
Угол j2,...°, ПРП под номером
Отчет по рейке в точке, мм
1
2
3
4
1
2
3
4
касания днища грузом рулетки bл
пересечения 1-го радиуса и 8-й окружности b8.1
Таблица В.5 - Степень наклона и угол приближенного направления наклона резервуара
Номер точки разбивки k от 1 до m/2
Отсчет по рейке lk, мм
Номер точки разбивки k от (m/2 + 1) до т
Отсчет по рейке lk, мм
1
2
3
4
1
l1
m/2 + 1
l(m/2 + l)
2
l2
m/2 + 2
l(m/2 + 2)
3
l3
m/2 + 3
l(m/2 + 3)
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
...
m/2
l(m/2)
т
lm
Примечания
1 k (графы 1,3)- номер разбивки длины окружности первого пояса резервуара, выбирают из ряда: 1, 2, 3,..., т.
2 lk (графы 2, 4) - отсчеты по рейке в точках разбивки k.
дополнить таблицей - В.5.1
Таблица В.5.1 - Степень наклона и угол уточненного направления наклона резервуара
Значение угла n2 при Nп =...
Показание рейки по правой разбивке lп, мм
Значение угла n2 при Nл =...
Показание рейки по правой разбивке lл, мм
l¢п
l²п
l¢л
l²п
1
2
3
4
5
6
-1°
+1°
-2°
+2°
-3°
+3°
-4°
+4°
-5°
+5°
-6°
+6°
-7°
+7°
-8°
+8°
-9°
+9°
-10°
+10°
-11°
+11°
-12°
+12°
-13°
+13°
-14°
+14°
-15°
+15°
-16°
+16°
Примечания
1 В головках граф 1,4 вносят числа разбивок Nп, Nл (например Nп = 17).
2 l¢п, l"п (графы 2, 3) - показания рейки по правым противоположным разбивкам.
3 l¢л, l"л (графы 5, 6) - показания рейки по левым противоположным разбивкам.
таблицу В.6 изложить в новой редакции:
Таблица В.6 - Текущие значения параметров поверочной жидкости
Номер измерения
Объем дозы (DVc)j, дм3, или показание счетчика жидкости qj, дм3 (Nj, имп.)
Уровень Hj, мм
Температура жидкости, °С
Избыточное давление в счетчике жидкости pj, МПа
Расход Q, дм3/мин, (дм3/имп.)
в резервуаре (Tp)j
в счетчике жидкости (Tт)j
1
2
3
4
5
6
7
1
2
3*
4
5*
...
...
...
* Номера измерений, выделяемые только для счетчиков жидкости с проскоком и только при применении статического метода измерений объема дозы жидкости.
дополнить таблицей - В.9.1:
Таблица В.9.1 - Параметры счетчика жидкости со сдвигом дозирования и проскоком
Наименование параметра
Значение параметра при расходе Q, дм3/мин
100
150
200
250
Сдвиг дозирования С, дм3
Проскок Пр, дм3
Приложение Г. Пункт Г.1.2. Формулу (Г.2) изложить в новой редакции:
«Lвн = Lн - 2p(d1 + dс.к + dс.п), (Г.2)»;
экспликацию дополнить абзацем:
«dс.п - толщина слоя антикоррозийного покрытия».
Пункт Г.1.3 дополнить подпунктами - Г.1.3.1 - Г.1.3.4:
«Г.1.3.1 За значение длины внутренней окружности второго пояса
резервуара с плавающей крышей (L*вн.ц)2п при высоте поясов, равной 1500 мм, принимают значение длины внутренней окружности первого пояса (L*вн.ц)1п, определяемое по формуле
(Lвн.ц)1f = Lн - 2p(d1 + dс.к + dс.п). (Г.2а)
Г.1.3.2 Длину внутренней окружности второго пояса резервуара с плавающей крышей при высоте поясов от 2250 до 3000 мм (L**вн.ц)2п или длину внутренней окружности третьего пояса при высоте поясов 1500 мм (L*вн.ц)3п определяют методом последовательных приближений, используя результаты отложений хорды S1 на уровне 1600 мм или на уровне 1200 мм по 9.1.12.2 настоящего стандарта в следующей последовательности:
а) в качестве первого приближения внутреннего диаметра пояса принимают значение внутреннего диаметра первого пояса, определенного по формуле (3и);
б) вычисляют центральный угол aх1, соответствующий остаточной хорде S0п (например для второго пояса), по формуле

где S0п - длина остаточной хорды, измеренной по 9.1.12.7;
D21 - внутренний диаметр второго пояса в первом приближении, значение которого принимают равным значению внутреннего диаметра первого пояса, определенного по формуле (3и);
в) вычисляют разность углов bх1 по формуле
bх1 = a1т1 + aх1 - 360°,
где a1 - центральный угол, вычисленный по формуле (3к) при числе отложений хорды т1 и принимаемый за значение первого приближения центрального угла;
г) вычисляют центральный угол a2 во втором приближении по формуле
 (Г.2б)
(Г.2б)Если bх1 < 0, то в формуле (Г.2б) принимают знак «+», если bх1 > 0 - знак «-»;
д) вычисляют внутренний диаметр второго пояса D22 во втором приближении по формуле

где S1 - хорда, длину которой вычисляют по формуле (3ж);
е) проверяют выполнение условия
Если это условие не выполняется, то определяют значение внутреннего диаметра второго пояса D32 в третьем приближении, вычисляя последовательно параметры по формулам:

bх2 = a2т1 + aх2 - 360°,

Проверяют выполнение условия
Если это условие не выполняется, то делают следующие приближения до выполнения условия
Выполняя аналогичные операции, указанные в перечислениях а) - е), определяют внутренний диаметр третьего пояса резервуара.
Г.1.3.3 Длины внутренних окружностей второго (L*вн.ц)2п и третьего (L**вн.ц)3п поясов резервуара с плавающей крышей вычисляют по формулам:


где D2, D3 - внутренние диаметры второго и третьего поясов, определенные методом последовательного приближения по Г.1.3.2.
Г.1.3.4 Длины внутренних окружностей вышестоящих поясов резервуара с плавающей крышей
 вычисляют по формуле
вычисляют по формуле (Г.10а)
(Г.10а)где
 - длина внутренней окружности первого пояса, вычисляемая по формуле (Г.2а);
- длина внутренней окружности первого пояса, вычисляемая по формуле (Г.2а);DRcpi - средние радиальные отклонения образующих резервуара, вычисляемые по формуле (Г.9);
i - номер пояса, выбираемый для резервуаров:
- при высоте поясов от 2250 до 3000 мм из ряда: 2, 3,..., n;
- при высоте поясов 1500 мм из ряда: 3, 4,..., n;
n - число поясов резервуара».
Подпункт Г.2.1.2, пункт Г.2.2. Формулу (Г.9) изложить в новой редакции:
«DRcpi = аср.i - аср1 (Г.9)»;
формула (Г.10). Заменить обозначение: DRc.pi на DRcpi.
Пункт Г.2.5. Формулу (Г.12) изложить в новой редакции:
«hi = hнi - Sihнхi + Si+1hнx(i+1), (Г.12)»;
экспликацию дополнить абзацами:
«Si, Si+1 - величины, имеющие абсолютное значение, равное 1, и в зависимости от схемы нахлеста поясов в соответствии с таблицей Б.6 (графа 6) принимают знак «+» или «-»;
hнx(i+1) - нахлеста (i + 1)-го вышестоящего пояса».
Пункт Г.3. Наименование изложить в новой редакции:
Источник: 1:
Русско-английский словарь нормативно-технической терминологии > максимальный уровень
-
5 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
6 стойка
strut
элемент конструкции, работающий на сжатие. — а structural member intended to resist compression.
- (в приборе) — post
-, амортизационная (шасси) (рис. 29) — shock strut
-, амортизационная (воздушно-масляная) — oleo (-pneumatic) shock strut
-, амортизационная основной ноги шасси — main lg shock strut, main oleo
-, амортизационная передней ноги шасси — nose lg shock strut, nose oleo
- бипланной коробки (рис. 2) — interplane strut
стойки, соединяющие верхнее и нижнее крыло. — struts connecting а plane to the plane above or below.
-, вертикальная (двери) — door post
-, вертикальная (опора ящика, контейнера) — upright post
- кожуха камеры сгорания — combustion chamber casing support
- корпуса задней опоры турбины — turbine rear bearing support strut
- корпуса передней опоры (радиальная, направляющая потока на входе в двигатель) — front bearing housing strut
- лобовых стекол, центральная — windshield center post
компас установлен на центральной стойке лобовых стекол кабины. — the compass is mounted on the windshield center post.
- обтекаемого (каплевидного) сечения — streamlined-section strut
- (-) обтекатель входного канала — inlet duct streamlined /airfoil/ strut
- (-) обтекатель (за турбиной) — (turbine exhaust nozzle) streamlined (support) strut
- опоры ротора — rotor bearing support strut
- подмоторной рамы — engine mount strut
-, радиальная (опоры турбины) — radial strut
- реактивного сопла (внутренняя) — nozzle airfoil support
-, санитарная (для крепления носилок в санитарном варианте ла) — stretcher /litter/ staunchion
- стенки лонжерона — spar web upright member
- шасси (см. опора) — landing gear (unit) /leg/
- шасси, автоматически регулируемая no высоте — self-shortening shock strut
- шасси велосипедного типа — bicycle(-type) landing gear (unit)
- шасси, главная (рис. 29) — main landing gear
- шасси, носовая (передняя) — nose landing gear
- шасси, обжатая — compressed shock strut, compressed oleo
- шасси, основная — main landing gear (main lg, mlg)
- шасси, основная лев, (прав.) — left (right) main landing gear, l(r) main lg
- шасси, передняя (рис. 27) — nose landing gear (nose lg, nlg)
- шасси, подкрыльевая (крыльевая) — main wing landing gear
- (амортизационная) шасси, полностью разгруженная — fully extended shock strut
- шасси, средняя (фюзеляжная) — main body landing gear
- шасси, средняя главная — body main landing gear
- шасси тележечного типа (рис. 29) — bogie(-type) landing gear (unit)
- шасси, убирающаяся вперед (в направлении полета, против небегающего потока), передняя — forward retracting nose landing gear
- шасси, убирающаяся назад — rearward retracting landing gear
- шасси, фюзеляжная — main body landing gear
ось (подвески) с. шасси — landing gear (main) pivot
путь движения с. шасси при выпуске (уборке) — landing gear extension (retraction) path
угол поворота передней с. — nose wheel steering angle
не выходить, не выпускаться (о стойке шасси) — fail to extend. the landing gear up red light remains illuminated with the landing gear unit failed to extend.Русско-английский сборник авиационно-технических терминов > стойка
7 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
8 шасси (ла)
landing gear
(разд. 032)
система опор (обычно убираемых в полете), предназначенная для обеспечения требуемого положения самолета на стоянке, передвижения земле (воде), смягчения и частичного поглощения возникающих при этом нагрузок. — units and components which furnish means of supporting and steering the aircraft on the ground or water, and make it possible to retract and store landing gear in flight.
- (в тексте о шасси, на графике) — gear
- (радиоаппаратуры) — chassis
рама, на которой монтируются элементы и проводка электронной схемы. — a frame which mounts electronic components and their associated circuitry.
-, бесподкосное — cantilever landing gear
-, велосипедное — bicycle landing gear
система опор шасси, расположенных одна за другой по продольной оси самолета, на концах крыла устанавливаются опорные колеса (рис. 26). — landing gear units set one behind the other under the longitudinal center of the fuselage, the wings being supported by small outrigger wheels.
- в промежуточном положении (или в движении на выпуск или уборку) — landing gear in transit the red door and intransit lights will be illuminated if any gear door is open and lg not locked.
"- в процессе выпуска/уборки" (табло) — lg in transit (light)
-, вспомогательное (напр., хвостовая опора) — supplementary gear
-, выпускаемое сбросом с замков убранного положения и с дожимом встречным потоком до постановки на замки выпущенного положения — free-fall wind-assisted extending landing gear
-, выпущенное — extended landing gear
- выпущено (надпись) — (lg) down
-, главное (рис. 29) — main landing gear
-, зафиксированное замками выпущенного положения — landing gear locked down
-, зафиксированное замками убранного положения — landing gear locked up
-, колесное — wheel(ed) landing gear
-, комбинированное — all-surface landing gear
-, крыльевое (при наличии фюзеляжных) — main wing landing gear
-, лыжное (вертолета) — skid landing gear
-, лыжное (самолета) — ski landing gear
-, многоколесное — multi-wheel landing gear
"- he выпущено" (не зафиксированы замками выпущенного положения) (табло) — unsafe lg
- не зафиксировано замками выпущенного положения — landing gear not locked down
- не на замках (т.е. не зафиксировано замками выпущенного положения) — unsafe landing gear (unsafe lg)
-, неубирающееся — nonretractable landing gear
шасси, жестко закрепленное к силовым элементам планеpa самолета. — а landing gear which is rigidly attached to the primary structure of an aircraft.
-, однополозное (вертолета) — single-skid landing gear
-, основное — main landing gear
главные стойки, обеспечивающие основную опору ла на земле (рис. 29). — l.g. units providing major support for the aircraft while on the ground.
- основное фюзеляжное (при многоопорной схеме напр., со средней основной ногой) — main body landing gear
-, подкрыльевое (основная стойка) — (main) wing landing gear
-, полозковое (вертолета) — skid landing gear
- (с подвеской колес) полурычажного типа (рис. 27) — semi-levered suspension landing gear
-, поплавковое (рис. 4) — float-type landing gear
- (с подвеской колес) рычажного типа (рис. 27) — levered-suspension landing gear
-, самоориентирующееся — castoring landing gear
- с опорными колесами на концах крыла (рис. 26) — landing gear with wingtip outrigger wheels
- с передним колесом, трехопорное — tricycle nose wheel landing gear
- с подкрыльными колесами, велосипедное (рис. 26) — bicycle landing gear with wingtip outrigger wheels
- с полурычажной подвеской (колес) (рис. 27) — semi-levered suspension landing gear
-, среднее (фюзеляжное) — main body landing gear
- с рычажной подвеской (колес) (рис. 27) — levered-suspension landing gear
- с фюзеляжными и подкрыльевыми стойками — main body and wing landing gear
- с хвостовым колесом (рис. 2) — tail-wheel landing gear
- с хвостовым колесом, трехопорное — tricycle tail wheel landing gear
- тележечного типа (четырехколесное) — (four-wheel) bogie landing gear
основная опора шасси имеет четырехколесную тележку на общей амортизационной стойке и убирается в фюзеляж (или крыло) (рис. 19). — main landing gear consists of two four-wheel bogies (bogie-type main units) on single shock struts, each unit retracting inwards into fuselage (wing).
- тележечное главное (с двумя парами колес) — (two dual) tandem wheel main landing gear
-, трехопорное — tricycle landing gear
-, трехопорное, с носовым колесом — tricycle nose wheel landing gear
-, убирающееся — retractable landing gear
шасси, убирающееся из выпущенного (рабочего) положения в фюзеляж или крыло с целью уменьшения лобового сопротивления ла. — retractable landing gear can be retracted from its operating (extended) position, usually into fuselage or wing structure, to reduce parasite drag.
-, убирающееся вперед по полету — forward-retracting landing gear
landing gear retracts forward to obtain wind-assisted free-fall in emergency.
-, убирающееся в сторону фюзеляжа (основное) — inward retracting (main) landing gear
-, убирающееся назад no noлету — rearward-retracting landing gear
-, убранное — retracted landing gear
- убрано (надпись) — (lg) up
-, узкоколейное — narrow-track landing gear
-, управляемое (на земле) — steerable landing gear
-, условное основное (у самолетика прибора пкп) — symbolic main (landing) gears
-, фюзеляжное (основное, при многоопорной схеме) — (main) body landing gear
-, четырехопорное — quadricycle landing gear
mi-4 helicopter is fitted with a quadricycle landing gear.
-, ширококолейное — wide-track landing gear
аварийный выпуск ш. — emergency landing gear extension
база ш. (рис. 25) — wheelbase
выпуск ш. — landing gear extension
выпуск ш. сбросом с замков убранного положения с дожимом от встречного потока до выпущенного положения — wind-assisted free-fall extension of landing gear
колея ш. (рис. 25) — wheel track
положение ш. — landing gear position
сигнализация (выпущенного, убранного) положения ш. — landing gear (extended, retracted) position indicating (system)
сигнализация положения ш. (предупредительная) — landing gear position warning (system)
цикл уборки и выпуска ш. — landing gear retraction extension cycle
выпускать ш. (гидравлически, пневматически, электрически) — extend landing gear (hydraulically, pneumatically, electrically)
снимать ш. с замка выпущенного положения — release landing gear downlock
снимать ш. с замка убранноro положения — release landing gear up-lock
ставить ш. на замок выпущенного положения — lock landing gear down, down-lock landing gear
ставить ш. на замок убранного положения — lock landing gear up, uplock landing gear
убирать ш. (гидравлически, пневматически, электрически) — retract landing gear (hydrauliсаlly, pneumatically, electrically
фиксировать ш. замком выпущенного (убранного) положения — lock landing gear down (up)Русско-английский сборник авиационно-технических терминов > шасси (ла)
9 трос
cable
-, боуденовский — bowden cable
-, буксирный — tow cable
-, буксировочный (связывающий спасательные плоты) — towline cut the towline if it is necessary to separate the liferafts.
-, вытяжной (ручного раскрытия парашюта) — rip cord
шнур или гибкая шпилька, служащая при выдергивании для открытия ранца и выпуска парашюта. — а cord or flexible cable on а mancarrying parachute which, when pulled, opens the pack and allows the parachute to deploy.
-, вытяжной (вспомогательный для вытягивания элементов парашютной системы, см. шнур вытяжной) — lazy leg а cord intended to withdraw-certain items of a parachute assembly.
-, вытяжной (вытяжное звено, фал парашюта) — static line
- вытяжной (фал, вытяжной шнур чеки) — lanyard
-, грузовой, с автоматическим освобождением груза при соприкосновении с землей) — automatic touchdown release cargo /load/ sling
- для зацепления карабинов фалов парашютов (для принудительного ввода парашютов) — static cable а steel cable to which static lines are attached (inside of fuselage).
- заземления (статический разрядник на стойке шасси) (рис. 27) — static discharge cable
- заземления крышки заправочной горловины — filler cap bonding cable
- зачековки — locking cable
- зачековки (гибкая шпилька ранца парашюта) — locking pin а hole in the parachute pack flap cone admits a locking pin.
- инерционного замка подтяга плечевых ремней — inertia reel shoulder harness cable
- натяжной (оттяжной) — guy cable /rope/, guy
трос для удерживания объекта в заданном (фиксированном) положении. — а горе used to keep something in position or steady.
- обратной связи управления (поворотом) переднего колеса — nosewheel steering feedback cable
-, оттяжной — guy cable /rope/, guy
-, предохранительный — safety rope
-, предохранительный (парашюта) — life line
-, приводной (возд. балона плота) — lanyard /rip cable, cord/ (or raft air bottle)
life raft is inflated by jerking the air bottle lanyard.
- принудительного ввода парашютной системы (трос пвпс) — static cable а static link is attached and slides on the static cable.
- принудительного ввода (раскрытия) парашютов — static cable
стальной трос, протянутый вдоль борта кабины, к которому крепятся и скользят стренги или вытяжные звенья парашютов. — а steel cable to which strops or static links are attached and can slide, extending along one side of the fuselage and secured at both ends.
- принудительного раскрытия парашютов, трос прп — static cable
- разблокировки стреляющеro механизма (катапультного кресла) — seat ejection gun unlock cable
-, расчалочный — bracing wire
- ручного раскрытия парашюта (вытяжной) — rip cord
- синхронизации закрылков — flap interconnection cable
служит для согласования выпуска закрылков. — used to provide symmetric flap operation.
-, слабонатянутый — slack cable
- следящей системы — follow-up (system) cable
- следящей системы управления поворотом колес (передней стойки шасси) — (nosewheel) steering follow-up cable
- сопровождения — assist cable
-, спасательный (вертолетный) — rescue sling
-, страховочный для работы на высокорасположенных элементах ла. — safety line
-, такелажный — sling
- управления — control cable
- управления поворотом передних колес(а) — nosawheel steering control cable
- фиксации гермошлема — (pressure) helmet restraint cable
- фиксации ног (на катапультном кресле) — foot restraint /retractor/ cable
-, швартовочный (для крепления груза в отсеке) — tie-down cable
-, швартовочный (ла) (рис. 150) — mooring /picketing/ cable in winds of over 80 knots aircraft must be headed into wind, with brakes on, wheel chocks lashed, nose and main gear moored.
вытягивание (удлинение) т. на... мм — stretching of cable by... mm
заделка т. — cable attachment
заделка т. на коуш — cable splicing around thimble
заделка т. на ролике — cable-to-pulley attachment
заплетка т. (процесс) — cable splicing
заплетка т. (узел) — cable splice
натяжение т. — cable tension
ослабление натяжения т. — cable slack(ness)
провисание т. — cable sag(ging)
сплеснивание т. — cable splicing
сращивание т. — cable splicing
выбирать слабину т. — take up cable slack
заделывать т. на коуш — splice cable around the thimble
ослаблять натяжение т. — slacken the cable
регулировать натяжение т. на... кг — adjust the cable tension to... kgРусско-английский сборник авиационно-технических терминов > трос
10 блейд-сервер
блейд-сервер
Модульный сверхтонкий сервер, оптимизированный для установки в разъемы серверного шкафа BladeCenter.
Применение серверов модульной конструкции (так называемых "лезвий", blades) обещает значительно снизить стоимость необходимого аппаратного обеспечения, уменьшить расходы на инфраструктуру, упростить установку и повысить гибкость конфигурации. "Лезвия" в несколько раз компактнее обычных однопроцессорных серверов высотой 1U, монтируемых в стойку; кроме того, они изначально создавались с учетом необходимости понижать энергопотребление и тепловыделение.
С помощью специального ПО модульные серверы легко перераспределяют свои ресурсы между различными приложениями, что позволяет снизить требования к производительности в пики нагрузок. Кроме того, "лезвия" дают дополнительную экономию, оптимально распределяя между собой ресурсы источников питания, вентиляторов и встроенных маршрутизаторов и тем самым снижая общие затраты на каждый сервер в отдельности. При этом повышается экономическая эффективность таких средств обеспечения надежности, как резервные концентраторы и источники питания. Наконец, объединение в одном корпусе большого числа серверов позволяет снизить стоимость администрирования и уменьшить количество возможных ошибок при соединении.
Модульные компьютеры, как правило, содержат всего одну плату (по размерам сравнимую с сетевым адаптером) и позволяют значительно увеличить плотность заполнения стандартных серверных стоек. В то время как размер обычного современного тонкого сервера составляет как минимум 1U такой стойки, целая группа модульных серверов Blade, включающая от 10 до 16 систем, занимает пространство высотой не более 3U. Очевидно, что данная технология позволит достичь беспрецедентных показателей концентрации вычислительной техники: вместо 40 процессоров в стандартной 72-дюймовой стойке можно устанавливать около 200. Использование модульных серверов позволяет не только на порядок увеличить концентрацию информационных ресурсов, но и изменять ее динамически.
Такие необычайные показатели достигаются благодаря исключению многих компонентов, входящих в состав большинства современных серверов. В случае "лезвий" приоритетные компоненты - это процессоры, память, магнитные носители, сетевое оборудование и устройства ввода-вывода, а не накопители на сменных носителях, USB-порты или порты для подключения клавиатуры и мыши. Такие важные компоненты, как блоки питания и вентиляторы, делаются общими, а длина сетевого кабеля уменьшается до минимума, что позволяет существенно упростить и удешевить систему. Операции, связанные с обработкой данных, осуществляются периферийными устройствами хранения данных.
[ http://www.aten.ru/glossary/index.htm]
блейд-сервер
«лезвие»
Компьютерные серверы с компонентами, вынесенными и обобщёнными в корзине для уменьшения занимаемого пространства. Корзина (англ. enclosure) — обойма для блейд-серверов, предоставляющая им доступ к общим компонентам, например, блокам питания и сетевым контроллерам. Блейд-серверы называют также ультракомпактными серверами.
[ http://www.dtln.ru/slovar-terminov]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > блейд-сервер
11 фиксатор салазок
Information technology: rail-release latch (используются при креплении сервера к стойке)12 захват
1) бор. ( приём) grip, hold- двойной захват
- захват бедра
- захват в стойке
- захват головы ножницами
- захват запястья
- захват за шею
- захват лодыжки
- захват на ключ
- захват ног
- захват пятки
- захват рук
- захват руки двумя руками
- захват рычагом
- захват туловища
- захват шеи из-под плеча сбоку
- захват шеи из-под плеча снаружи
- захват шеи из-под плеч
- косой захват
- обратный захват
- обратный захват туловища
- освобождаться от захвата
- отбивать захват
- захват за отворот куртки
- захват за рукав
- захват крестом
- захват узлом
- удушающий захват
- удушающий захват крестом
- взять захват
- захват шеи из-под плеча изнутри2) бокс (держание) clinch3) т.а. ( держание снаряда) hold- захват грифа в замок4) снб.5) фут. ( нарушение)- захват противника за маску13 монтаж
1. м. assembly, mounting2. м. erectionпроцесс монтажа; монтажные работы — erection procedure
3. м. installation, mounting4. м. wiringмонтаж голым проводом; струнный монтаж — piano wiring
5. м. кфт. montage; editingнавесной монтаж — point-to-point wiring; discrete components
объёмный монтаж — space-wired interconnections; dense-packed point-to-point wiring
печатный монтаж — printed wiring; printed circuitry
изготавливать печатный монтаж вакуумным напылением — manufacture the printed wiring by vacuum evaporation
14 фен с жестким капюшоном
3.101 фен с жестким капюшоном (helmet-type hairdryer): Фен, имеющий жесткий капюшон, который расположен над головой при нормальной эксплуатации.
Примечание - Капюшон может быть закреплен на стойке или иметь средства крепления к опоре.
Источник: ГОСТ Р 52161.2.23-2007: Безопасность бытовых и аналогичных электрических приборов. Часть 2.23. Частные требования для приборов по уходу за кожей и волосами оригинал документа
Русско-английский словарь нормативно-технической терминологии > фен с жестким капюшоном
См. также в других словарях:
Гильотина (удушающий приём) — У этого термина существуют и другие значения, см. Гильотина. Проведение «гильотины» в стойке. Удушающий приём «Гильотина» вид удушающего приёма, в котором шея противника захватывается под мышк … Википедия
Постоянство углового положения горизонтальной бабки в поперечном направлении при ее перемещении по стойке — 1.2.15. Постоянство углового положения горизонтальной бабки в поперечном направлении при ее перемещении по стойке: Черт. 26 Таблица 15 Длина перемещения, мм Допуск, мм/м (угловые секунды), для станков класса точности Н П До 1600 0,03 (6) 0,02 (4) … Словарь-справочник терминов нормативно-технической документации
Битва при Чаттануге — Гражданская война в Америке … Википедия
Отель при постоянном представительстве Республики Коми — (Москва,Россия) Категория отеля: 3 звездочный отель Адрес … Каталог отелей
Постоянство углового положения бокового суппорта при его перемещении — 1.2.9. Постоянство углового положения бокового суппорта при его перемещении Уровень устанавливают на боковом суппорте в плоскости, перпендикулярной направлению перемещения стола (черт. 21). Черт. 20 Черт. 21 Таблица 8 Длина перемещения, мм Допуск … Словарь-справочник терминов нормативно-технической документации
Дзюдо — 柔道 Написание слова дзюдо иероглифами Название боевого искусства (БИ) … Википедия
Техника дзюдо — (Кодокан дзюдо и других стилей) включает самые разнообразные приёмы: броски, болевые приёмы, удушения и удары. Не все приёмы разрешены в соревнованиях по спортивному дзюдо … Википедия
Сноуборд — с мягкими креплениями Сноуборд (англ. snowboard, букв. «снежная доска») спортивный снаряд, предназначенный для скоростного спуска с заснеженных склонов и гор. Сноуборд представляет собой плоскую конструкцию, состоящую из … Википедия
Сноуборд (спортивный инвентарь) — О виде спорта см. Сноуборд (вид спорта). У этого термина существуют и другие значения, см. Сноуборд (значения) … Википедия
Греко-римская борьба — Эту статью следует викифицировать. Пожалуйста, оформите её согласно правилам оформления статей … Википедия
Классическая борьба — Греко римская борьба (классическая борьба, французская борьба, спортивная борьба греко римского стиля) европейский вид единоборства, в которой спортсмен должен, с помощью определённого арсенала технических действий (приёмов), вывести противника… … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на английский
с английского на русский- С английского на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский